Conceitualmente o estudo da eletricidade é divido em três grandes áreas: a geração, a distribuição e o uso. Dentre elas a disciplina de comandos elétricos está direcionada ao uso desta energia, assim pressupõe-se neste texto que a energia já foi gerada, transportada a altas tensões e posteriormente reduzida aos valores de consumo, com o uso de transformadores apropriados.
Por definição os comandos elétricos tem por finalidade a manobra de motores elétricos que são os elementos finais de potência em um circuito automatizado. Entende-se por manobra o estabelecimento e condução, ou a interrupção de corrente elétrica em condições normais e de sobre-carga. Os principais tipos de motores são:
· Motor de Indução
· Motor de corrente contínua
· Motores síncronos
· Servomotores
· Motores de Passo
Estima-se que 40% do consumo de energia no país é destinada ao acionamento dos motores elétricos (Filippo Filho, 2000). No setor industrial, mais da metade da energia é consumida por motores.
Os Servomotores e Motores de Passo necessitam de um “driver” próprio para o seu acionamento, tais conceitos fogem do escopo deste curso. Dentre os motores restantes, os que ainda têm a maior aplicação no âmbito industrial são os motores de indução trifásicos, pois em comparação com os motores de corrente contínua, de mesma potência, eles tem menor tamanho, menor peso e exigem menos manutenção. A figura 3.1 mostra um motor de indução trifásico típico.
Existem diversas aplicações para os motores de indução, dentre elas pode-se citar:
· O transporte de fluídos incompressíveis, onde se encontram as bombas de água e óleo;
· O processamento de materiais metálicos, representado pelas furadeiras, prensas, tornos;
· A manipulação de cargas feita pelos elevadores, pontes rolantes, talhas, guindastes, correias transportadoras, entre outros.
Havendo ressaltada a importância dos motores em sistemas automatizados, descreve-se nos próximos parágrafos, os conceitos de comandos, necessários a manobra dos mesmos.
Um dos pontos fundamentais para o entendimento dos comandos elétricos é a noção de que “os objetivos principais dos elementos em um painel elétrico são: a) proteger o operador e b) propiciar uma lógica de comando”.
Partindo do princípio da proteção do operador, mostra-se na figura 3.2, uma sequência genérica dos elementos necessários a partida e manobra de motores, onde são encontrados os seguintes elementos:
· Seccionamento: só pode ser operado sem carga. Usado durante a manutenção e verificação do circuito.
· Proteção contra correntes de curto-circuito: destina-se a proteção dos condutores do circuito terminal.
· Proteção contra correntes de sobrecarga: para proteger as bobinas do enrolamento do motor.
· Dispositivos de manobra: destinam-se a ligar e desligar o motor de forma segura, ou seja, sem que haja o contato do operador no circuito de potência, onde circula a maior corrente.
É importante repetir que no estudo de comandos elétricos deve-se ter a sequência mostrada na figura 3.2 em mente, pois ela consiste na orientação básica para o projeto de qualquer circuito.
Ainda falando em proteção, as manobras (ou partidas de motores) convencionais, são divididas em dois tipos, segundo a norma IEC 60947:
I. Coordenação do tipo 1: Sem risco para as pessoas e instalações, ou seja, desligamento seguro da corrente de curto-circuito. Porém podem haver danos ao contator e ao relé de sobrecarga.
II. Coordenação do tipo 2: Sem risco para as pessoas e instalações. Não pode haver danos ao relé de sobrecarga ou em outras partes, com exceção de leve fusão dos contatos do contator e estes permitam uma fácil separação sem deformações significativas.
O relé de sobrecarga, os contatores e outros elementos em maiores detalhes nos capítulos posteriores, bem como a sua aplicação prática em circuitos reais.
Em comandos elétricos trabalhar-se-á bastante com um elemento simples que é o contato. A partir do mesmo é que se forma toda lógica de um circuito e também é ele quem dá ou não a condução de corrente. Basicamente existem dois tipos de contatos, listados a seguir:
i. Contato Normalmente Aberto (NA): não há passagem de corrente elétrica na posição de repouso, como pode ser observado na figura 3.3(a). Desta forma a carga não estará acionada.
ii. Contato Normalmente Fechado (NF): há passagem de corrente elétrica na posição de repouso, como pode ser observado na figura 3.3(b). Desta forma a carga estará acionada.
Os citados contatos podem ser associados para atingir uma determinada finalidade, como por exemplo, fazer com que uma carga seja acionada somente quando dois deles estiverem ligados. As principais associações entre contatos são descritas a seguir.
Associação de contatos normalmente abertos
Basicamente existem dois tipos, a associação em série (figura 3.4a) e a associação em paralelo (3.4b).
Quando se fala em associação de contatos é comum montar uma tabela contendo todas as combinações possíveis entre os contatos, esta é denominada de “Tabela Verdade”.
As tabelas 3.1 e 3.2 referem-se as associações em série e paralelo.
Nota-se que na combinação em série a carga estará acionada somente quando os dois contatos estiverem acionados e por isso é denominada de “função E”. Já na combinação em paralelo qualquer um dos contatos ligados aciona a carga e por isso é denominada de “função OU”.
Associação de contatos normalmente fechados
Os contatos NF da mesma forma podem ser associados em série (figura 3.5a) e paralelo (figura 3.5b), as respectivas tabelas verdade são 3.3 e 3.4.
Nota-se que a tabela 3.3 é exatamente inversa a tabela 3.2 e portanto a associação em série de contatos NF é denominada “função não OU”. Da mesma forma a associação em paralelo é chamada de “função não E”.
Principais elementos em comandos elétricos
Havendo estudado os principais tipos de contato, o próximo passo é conhecer os componentes de um painel elétrico.
Botoeira ou Botão de comando
Quando se fala em ligar um motor, o primeiro elemento que vem a mente é o de uma chave. Entretanto, no caso de comandos elétricos a “chave” que liga os motores é diferente de uma chave usual, destas encontradas em residências, utilizadas para ligar a luz, por exemplo. A diferença principal está no fato de que ao movimentar a “chave residencial” ela vai para uma posição e permanece nela, mesmo quando se retira a pressão do dedo. Na “chave industrial” ou botoeira há o retorno para a posição de repouso através de uma mola, como pode ser observado na figura 3.6a. O entendimento deste conceito é fundamental para compreender o porque da existência de um selo no circuito de comando.
A botoeira faz parte da classe de componentes denominada “elementos de sinais”.
Estes são dispositivos pilotos e nunca são aplicados no acionamento direto de motores.
A figura 3.6a mostra o caso de uma botoeira para comutação de 4 pólos. O contato NA (Normalmente Aberto) pode ser utilizado como botão LIGA e o NF (Normalmente Fechado) como botão DESLIGA. Esta é uma forma elementar de intertravamento. Note que o retorno é feito de forma automática através de mola. Existem botoeiras com apenas um contato. Estas últimas podem ser do tipo NA ou NF.
Ao substituir o botão manual por um rolete, tem-se a chave fim de curso, muito utilizada em circuitos pneumáticos e hidráulicos. Este é muito utilizado na movimentação de cargas, acionado no esbarro de um caixote, engradado, ou qualquer outra carga.
Outros tipos de elementos de sinais são os Termostatos, Pressostatos, as Chaves de Nível e as chaves de fim de curso (que podem ser roletes).
Todos estes elementos exercem uma ação de controle discreta, ou seja, liga / desliga. Como por exemplo, se a pressão de um sistema atingir um valor máximo, a ação do Pressostato será o de mover os contatos desligando o sistema. Caso a pressão atinja novamente um valor mínimo atua-se re-ligando o mesmo.
Relés
Os relés são os elementos fundamentais de manobra de cargas elétricas, pois permitem a combinação de lógicas no comando, bem como a separação dos circuitos de potência e comando. Os mais simples constituem-se de uma carcaça com cinco terminais.
Os terminais (1) e (2) correspondem a bobina de excitação. O terminal (3) é o de entrada, e os terminais (4) e (5) correspondem aos contatos normalmente fechado (NF) e normalmente aberto (NA), respectivamente.
Uma característica importante dos relés, como pode ser observado na figura 3.7 é que a tensão nos terminais (1) e (2) pode ser 5 Vcc, 12 Vcc ou 24 Vcc, enquanto simultâneamente os terminais (3), (4) e (5) podem trabalhar com 110 Vca ou 220 Vca. Ou seja não há contato físico entre os terminais de acionamento e os de trabalho. Este conceito permitiu o surgimento de dois circuitos em um painel elétrico:
i. Circuito de comando: neste encontra-se a interface com o operador da máquina ou dispositvo e portanto trabalha com baixas correntes (até 10 A) e/ou baixas tensões.
ii. Circuito de Potência: é o circuito onde se encontram as cargas a serem acionadas, tais como motores, resistências de aquecimento, entre outras. Neste podem circular correntes elétricas da ordem de 10 A ou mais, e atingir tensões de até 760 V.
Em um painel de comando, as botoeiras, sinaleiras e controladores diversos ficam no circuito de comando.
Do conceito de relés pode-se derivar o conceito de contatores, visto no próximo item.
Contatores
Para fins didáticos pode-se considerar os contatores como relés expandidos pois o princípio de funcionamento é similar. Conceituando de forma mais técnica, o contator é um elemento eletro-mecânico de comando a distância, com uma única posição de repouso e sem travamento.
Como pode ser observado na figura 3.8, o contator consiste basicamente de um núcleo magnético excitado por uma bobina. Uma parte do núcleo magnético é móvel, e é atraído por forças de ação magnética quando a bobina é percorrida por corrente e cria um fluxo magnético. Quando não circula corrente pela bobina de excitação essa parte do núcleo é repelida por ação de molas. Contatos elétricos são distribuídos solidariamente a esta parte móvel do núcleo, constituindo um conjunto de contatos móveis. Solidário a carcaça do contator existe um conjunto de contatos fixos. Cada jogo de contatos fixos e móveis podem ser do tipo Normalmente aberto (NA), ou normalmente fechados (NF).

Os contatores podem ser classificados como principais (CW, CWM) ou auxiliares (CAW). De forma simples pode-se afirmar que os contatores auxiliares tem corrente máxima de 10A e possuem de 4a 8 contatos, podendo chegar a 12 contatos. Os contatores principais tem corrente máxima de até 600A. De uma maneira geral possuem 3 contatos principais do tipo NA, para manobra de cargas trifásicas a 3 fios.
Um fator importante a ser observando no uso dos contatores são as faíscas produzidas pelo impacto, durante a comutação dos contatos. Isso promove o desgaste natural dos mesmos, além de consistir em riscos a saúde humana. A intensidade das faíscas pode se agravar em ambientes úmidos e também com a quantidade de corrente circulando no painel. Dessa forma foram aplicadas diferentes formas de proteção, resultando em uma classificação destes elementos. Basicamente existem 4 categorias de emprego de contatores principais:
a. AC1: é aplicada em cargas ôhmicas ou pouco indutivas, como aquecedores e fornos a resistência.
b. AC2: é para acionamento de motores de indução com rotor bobinado.
c. AC3: é aplicação de motores com rotor de gaiola em cargas normais como bombas, ventiladores e compressores.
d. AC4: é para manobras pesadas, como acionar o motor de indução em plena carga, reversão em plena marcha e operação intermitente.
A figura 3.9 mostra o aspecto de um contator comum. Este elemento será mais detalhado em lições posteriores.
Fusíveis
Os fusíveis são elementos bem conhecidos pois se encontram em instalações residenciais, nos carros, em equipamentos eletrônicos, máquinas, entre outros.
Tecnicamente falando estes são elementos que destinam-se a proteção contra correntes de curto-circuito. Entende-se por esta última aquela provocada pela falha de montagem do sistema, o que leva a impedância em determinado ponto a um valor quase nulo, causando assim um acréscimo significativo no valor da corrente.
Sua atuação deve-se a a fusão de um elemento pelo efeito Joule, provocado pela súbita elevação de corrente em determinado circuito. O elemento fusível tem propriedades físicas tais que o seu ponto de fusão é inferior ao ponto de fusão do cobre. Este último é o material mais utilizado em condutores de aplicação geral.
Fig. 3.9a - Fusível NH
Disjuntores
Os disjuntores também estão presentes em algumas instalações residenciais, embora sejam menos comuns do que os fusíveis. Sua aplicação determinadas vezes interfere com a aplicação dos fusíveis, pois são elementos que também destinam-se a proteção do circuito contra correntes de curto-circuito. Em alguns casos, quando há o elemento térmico os disjuntores também podem se destinar a proteção contra correntes de sobrecarga.
A corrente de sobrecarga pode ser causada por uma súbita elevação na carga mecânica, ou mesmo pela operação do motor em determinados ambientes fabris, onde a temperatura é elevada.
A vantagem dos disjuntores é que permitem a re-ligação do sistema após a ocorrência da elevação da corrente, enquanto os fusíveis devem ser substituídos antes de uma nova operação.
Para a proteção contra a sobrecarga existe um elemento térmico (bi-metálico). Para a proteção contra curto-circuito existe um elemento magnético.
O disjuntor precisa ser caracterizado, além dos valores nominais de tensão, corrente e frequência, ainda pela sua capacidade de interrupção, e pelas demais indicações de temperatura e altitude segundo a respectiva norma, e agrupamento de disjuntores, segundo informações do fabricante, e outros, que podem influir no seu dimensionamento.
A figura 3.10 mostra o aspecto físico dos disjuntores comerciais.
Relé térmico ou de sobrecarga
Antigamente a proteção contra corrente de sobrecarga era feita por um elemento separado denominado de relé térmico. Este elemento é composto por uma junta bimetálica que se dilatava na presença de uma corrente acima da nominal por um período de tempo longo. Atualmente os disjuntores englobam esta função e sendo assim os relés de sobrecarga caíram em desuso.
Simbologia gráfica
Até o presente momento mostrou-se a presença de diversos elementos constituintes de um painel elétrico. Em um comando, para saber como estes elementos são ligados entre si é necessário consultar um desenho chamado de esquema elétrico. No desenho elétrico cada um dos elementos é representado através de um símbolo. A simbologia é padronizada através das normas NBR, DIN e IEC. Na tabela 2.5 apresenta-se alguns símbolos referentes aos elementos estudados nos parágrafos anteriores.
Conceitos básicos em circuitos de comandos elétricos
Para ler e compreender a representação gráfica de um circuito elétrico, é imprescindível conhecer os componentes básicos dos comandos elétricos e também suas finalidades. Alguns destes elementos são descritos a seguir.
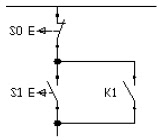
A) Selo: O contato de selo é sempre ligado em paralelo com o contato de fechamento da botoeira. Sua finalidade é de manter a corrente circulando pelo contator, mesmo após o operador ter retirado o dedo da botoeira.
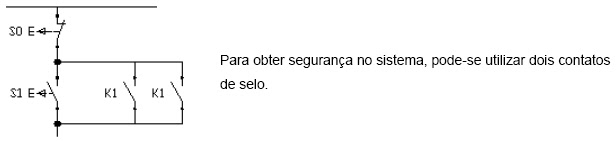
B) Selo com dois contatos
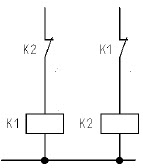
C) Intertravamento: Processo de ligação entre os contatos auxiliares de vários dispositivos, pelo qual as posições de operação desses dispositivos são dependentes umas das outras. Através do intertravamento, evita-se a ligação de certos dispositivos antes que os outros permitam essa ligação.
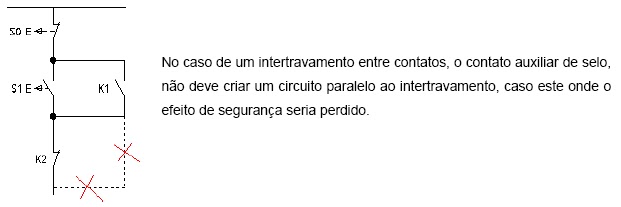
E) Circuito paralelo ao intertravamento